پایان نامه کارشناسی
دانلود مقالات فنی و مهندسی و علوم انسانی (علوم تربیتی روانشناختی)پایان نامه کارشناسی
دانلود مقالات فنی و مهندسی و علوم انسانی (علوم تربیتی روانشناختی)ترجمه مقاله کنترل فرکانس هوشمند در یک ریزشبکه AC: تکنیک تنظیم فازی مبنی بر PSO آنلاین
دسته: برق
حجم فایل: 4253 کیلوبایت
تعداد صفحه: 25
ترجمه مقاله کنترل فرکانس هوشمند در یک ریزشبکه AC: تکنیک تنظیم فازی مبنی بر PSO آنلاین
چکیده سیستم های قدرت مدرن، نیازمند افزایش هوش و انعطاف پذیری در کنترل و بهینه سازی هستند، تا از قابلیت تثبیت تعادل میان بار و تولید _به دنبال تداخلات جدی_ اطمینان حاصل شود. این قضیه امروز، به سبب افزایش تعداد ریزشبکه ها (MG) ، در حال یافتن اهمیتی بیش از پیش است. ریزشبکه ها اغلب از انرژی های تجدیدپذیر برای تولید توان الکتریکی استفاده می کنند، که تولید توان با این انرژی ها، طبیعتا متغیر است. این تغییرات و عدم قطعیت های رایج در سیستم قدرت، موجب می شود که کنترل کننده های قدیمی نتوانند عملکرد مناسبی را در بازه های گسترده شرایط عملیاتی، ارایه دهند. در پاسخ به این چالش، این مقاله یک روش هوشمند آنلاین جدید را، با آمیختن تکنیک های منطق فازی و بهینه سازی ازدحام ذرات (PSO) ، برای تنظیم بهینه ی معروف ترین کنترل کننده های مبتنی بر تناسبی-انتگرالی (PI) در سیستم های میکرو شبکه، ارایه می دهد. این روش طراحی کنترل، بر روی یک ریزشبکه AC _به عنوان مورد آزمایشی_ تست شده است. عملکرد ترکیب کنترلی هوشمند ارایه شده، با روش های کنترل PI کاملا فازی و کنترل PI زیگلر-نیکولز، مقایسه شده است.
کلیدواژگان: منطق فازی، کنترل هوشمند، ریزشبکه، تنظیم بهینه، بهینه سازی ازدحام ذره، کنترل فرکانس ثانویه.
پروژه کارشناسی ارشد برق
فایل محتوای:
1) اصل مقاله لاتین 10 صفحه 2012 IEEE
2) متن ورد ترجمه شده بصورت کاملا تخصصی 25 صفحه

مطالب مرتبط
ترجمه مقاله روش یادگیری فازی Q برای هدایت کردن ربات خودکار
دسته: کامپیوتر
حجم فایل: 956 کیلوبایت
تعداد صفحه: 14
روش یادگیری فازی Q برای هدایت کردن ربات خودکار
خلاصه- الگوریتم پیشنهاد داده شده مزیت هایی را از روش منطق فازی جفت شده و یادگیری Q برای برآورده ساختن نیازهای مربوط به هدایت کردن خودکار دریافت کرده است. سپس قوانین فازی یک تصمیم گیری و یک چارچوب کاری قابل قبول را برای مدیریت کردن عدم اطمینان ها فراهم می سازد و همچنین اجازه استفاده کردن از دانش سلسله واری را نیز می دهد. ساختار دینامیکی مربوط به یادگیری Q آن را به صورت یک ابزار متعهد در آورده است که تنظیم کننده پارامترهای تداخل فازی در زمانی است که دانش کمی در این زمینه وجود دارد یا اصلا وجود ندارد که در این صورت در سراسر دنیا در دسترس می باشد. ربات در سر تا سر دنیا به صورت مجموعه ای از جفت ها با فعالیت حرکتی مدل شده است. برای هر وضعیت فازی شده، برخی از فعالیت های پیشنهاد داده شده وجود دارد. وضعیت ها مرتبط با فعالیت های منطبق آن ها از طریق قوانین فازی می باشد که خود براساس استدالال انسانی هستند. ربات فعالیت تحریک شده بیشتری را برای هر وضعیت از طریق آزمایش های آنلاین انتخاب می کند. کارایی مربوط به روش پیشنهاد داده شده از طریق آزمایش هایی براساس ربات شبیه سازی شده Khepera موجود می باشد.
کلیدواژگان: یادگیری Q فازی- هدایت کردن خودکار- ربات Khepera
مطالب مرتبط
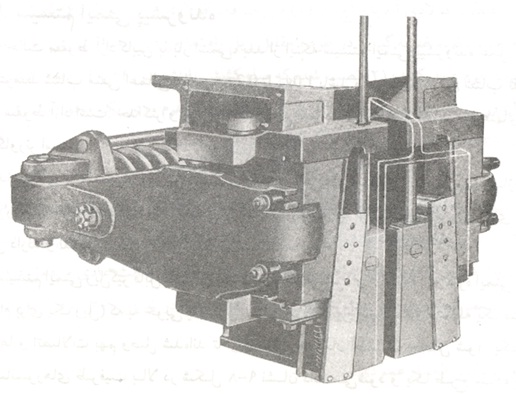
کارآموزی پرس ها و نحوه عملکرد آن ها
فصل اول معرفی کارخانه برش و پرس ایران خودرو
فصل دوم طراحی قالبهای پرس
مقدمه
برشکاری
1-2-برشکاری
2-2-2- مناطق برش
3-2-2-نحوه دادن کلیرانس به سنبه و ماتریس
4-2-2-کلیرانس زاویه ای
5-2-2- اضافه دور ریز
6-2-2-نیروی لازم برش
7-2-2- انرژی لازم برش
8-2-2- روشهای کم کردن نیروی لازم برش
9-2-2- نیروی لازم بیرون انداز
2-2- اجزای قالب
3-2- طراحی قالب
1-3-2- بدست آمدن قطعه میل راهنما
2-3-2-طراحی سنبه و پیچها
4-2- روشهای ساخت قالب
5-2- انواع قالبهای برش
6-2- پارامترهای مؤثر در انتخاب قالب
7-2-خمکاری
1-7-2- انواع عملیات و قالبهای خمکاری
2-7-2-نیروی لازم خمکاری
3-7-2-نیروی بالشتک فشاری
8-2- کشش عمیق
1-8-2- عیوب عملیات کشش عمیق2-8-2-عیوب ورق بعد از عملیات کشش عمیق
9-2- متغیرهای کشش عمیق
فصل سوم پرسها
1-3- پرسهای سنگی
4-2-3- محاسبه مشخصه های پرسهای سنگی
2-2-3- نیروی مجاز پرس سنگی
3-2-3-تناژ مجاز نامی حاصل از گشتی در موتور
4-2-3- تناژ مجاز نامی حاصل از قدرت کاری (توصین)
3-3- پرسهای زانویی
4-3-3- نیروی رام و ظرفیت کاری
2-3-3- سرعت رام
4-3- پرسهای پیچی
5-3- پرسهای الکتروژن
6-3- پرسهای هیدرولیک
فصل چهارم طرز کار، انتخاب و تجهیزات کمکی پرسها
1-4 طرز کار پرسها
2-4 انتخاب پرسها
3-4 نصب و نظارت قالب
4-4-تجهیزات ایمنی روی پرسها
5-4-سرویس و نگهداری پرسها وقالبها
6-4-تنظیم و نگهداری قالبها
فصل پنجم دقت پرسهای مکانیکی
1-5-دقت در حالت بی باری
2-5-دقت در حالت تحت بار
فصل ششم سیستمهای ایمنی در برابر اضافه بارپرسهای مکانیکی
1-6 وسایل ایمنی برای پرسهای مکانیکی در محدوده کورس مورد استفاده
2-6-وسایل ایمنی پرسهای مکانیکی در کل کورس
مراجع
مطالب مرتبط
پاراشوت (سیستم ایمنی آسانسورها)
دسته: مکانیک
حجم فایل: 1000 کیلوبایت
تعداد صفحه: 23
پاراشوت (سیستم ایمنی آسانسورها)
آسانسور دارای کابینی است که ساختار، ابعاد و تجهیزات آن به اشخاص به سهولت اجازه استفاده می دهد و میان ریلهای منصوبه عمودی با حداکثر انحراف 15 درجه حرکت میکند.
آسانسور در داخل محیطی نصب می شود که از سه قسمت تشکیل شده است:
: موتورخانه 1-
برای برقراری موتور و گیربکس و تابلو کنترل آسانسور و تابلو برق
2- چاه آسانسور:
برای نصب درها، ریلها و همچنین محلی برای حرکت کابین و وزنه
3-چاهک:
در پایین ترین قسمت چاه آسانسوربرای ضربه گیرها
موتور گیربکس بعنوان قلب آسانسور و تابلو کنترل بعنوان مغز آسانسور عمل می نماید. و…
مطالب مرتبط
ترمز طراحی شده در SolidWorks (سالیدورکس) و CATIA (کتیا) - 450
قابل مشاهده در CATIA – SolidWorks – NX – PRO
همراه فایل تک تک قطعات داخل فایل سه بعدی
آماده جهت رندرگیری
برای سفارش هرنوع پروژه یا مدل دیگر یا تهیه نقشه از مدل ها به آدرس زیر ایمیل بزنید تا درخواست شما در اسرع وقت در سایت قرار داده شود
مطالب مرتبط
- تایر طراحی شده در SolidWorks (سالیدورکس) و CATIA (کتیا) – 478
- شیر طراحی شده در SolidWorks (سالیدورکس) و CATIA (کتیا) – 477
- مته طراحی شده در SolidWorks (سالیدورکس) و CATIA (کتیا) – 457
- فنر طراحی شده در SolidWorks (سالیدورکس) و CATIA (کتیا) – 455
- شیر طراحی شده در SolidWorks (سالیدورکس) و CATIA (کتیا) – 465